
Tact | Lightweight Haptics Sandbox for Opus
Year: 2025
Status: Public
Skills: arduino, haptics, python, electronics prototyping, research
Github Repo Link
Original Paper Link
What:
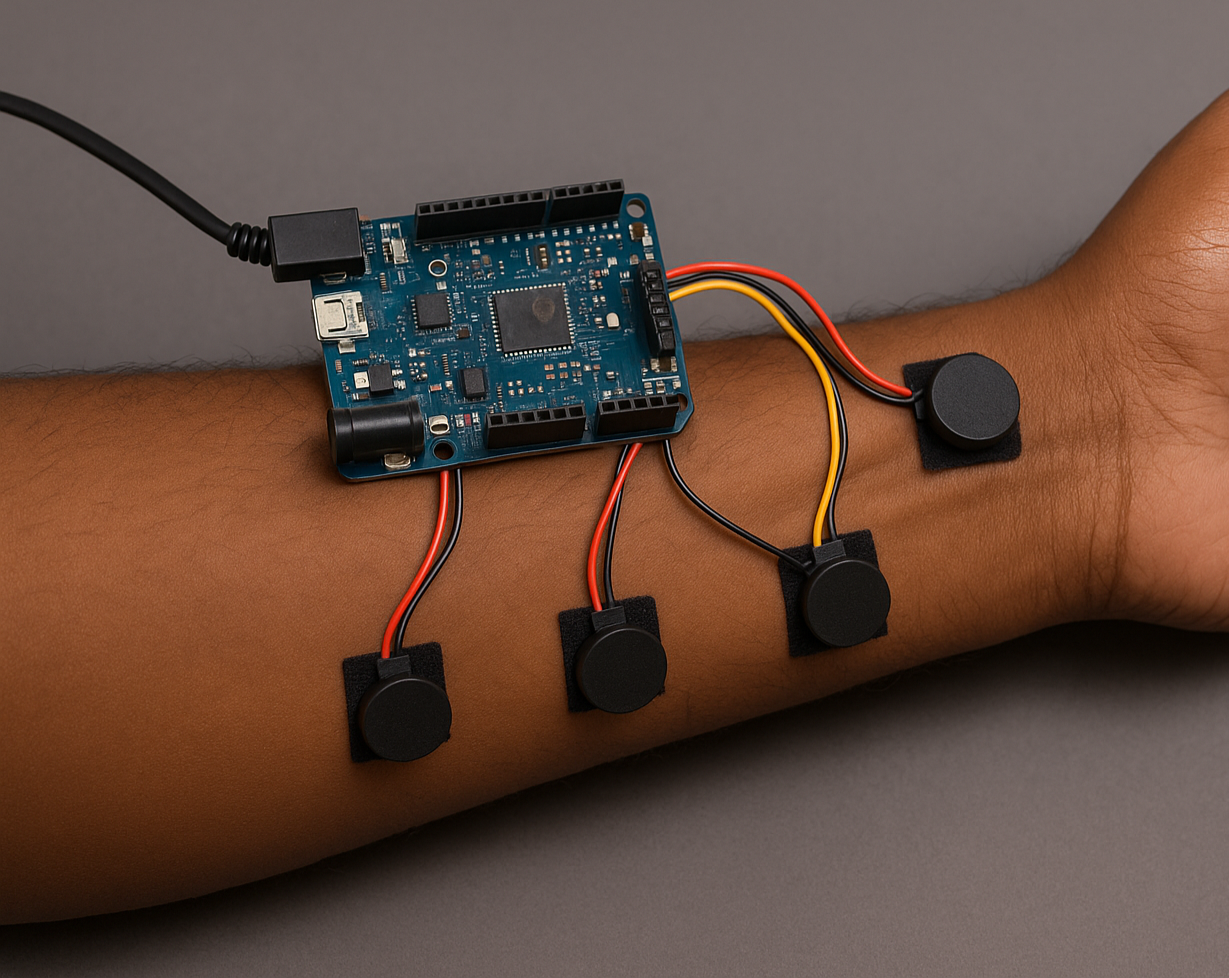
Tact is a lightweight haptic feedback system that turns virtual or simulated touch events into physical sensations using multiple vibrotactile motors. Originally based on the “Virtual Encounters of the Haptic Kind“ paper, it is built on the Arduino 101 platform and designed as a simple, testable interface for experimenting with basic forms of mediated touch. The system responds to contact events with either short pulse gestures or pressure-scaled vibrations, allowing users to feel digital interactions in real time.
Why:
The goal behind Tact is to create a fast, low-friction way to study how people interpret and emotionally respond to tactile signals. Instead of waiting for complex VR systems or full wearable platforms, I wanted a quick sandbox that lets me prototype touch-based communication in minutes rather than weeks. It also acts as an experimental bridge toward my larger project, Opus, which explores emotionally expressive haptic communication driven by AI. Tact gives immediate insight into latency, comfort, spatial feedback, and pattern language, all of which are critical for building intuitive and meaningful haptic interfaces for Opus.
How:
The system uses three to four coin-style vibration motors placed on the hand or forearm, each controlled by pulse width modulation over USB serial. Touch events are sent as simple CSV messages with penetration depth and first-contact flags. The firmware interprets these signals into gestures like strokes, pokes, or squeezes, allowing for recognizable tactile patterns without complex software overhead. Everything is intentionally constrained so that the full setup, from wiring to testing, can be completed in under an hour.